Automatic Reward Densification
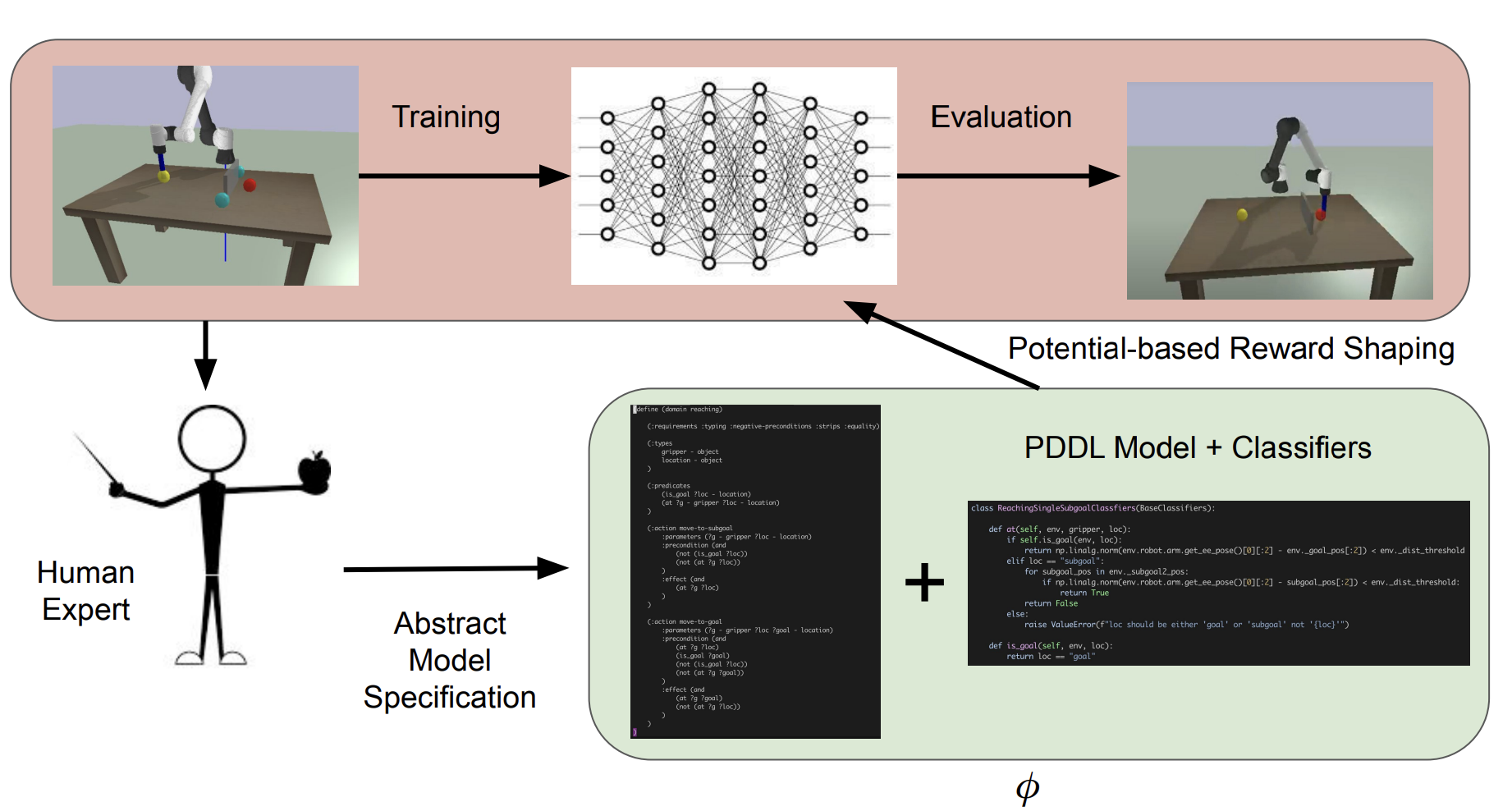
Classical planning over human-specified PDDL models, combined with potential-based shaping, densifies sparse rewards and speeds up learning across robotic tasks.

Classical planning over human-specified PDDL models, combined with potential-based shaping, densifies sparse rewards and speeds up learning across robotic tasks.
Prototype wearable combines OCR and face recognition to support blind users with reading and social identification.
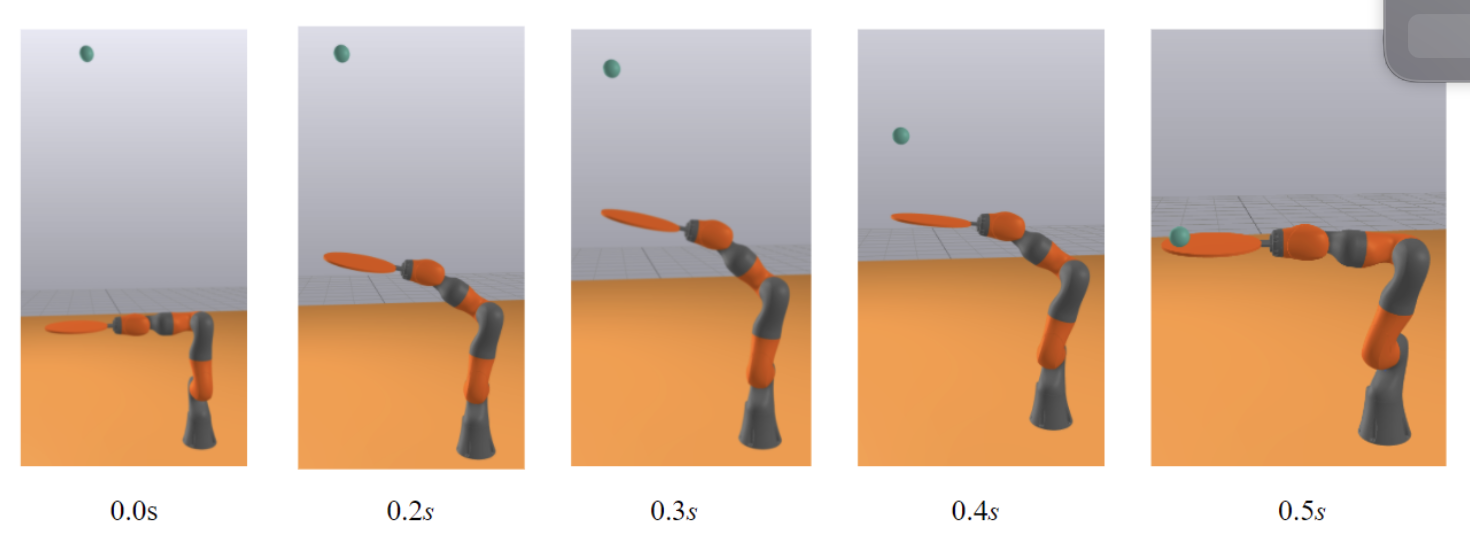
Drake-based finite-state control splits the catch into pre- and post-contact modes, combining projectile modeling with stabilized IK to stop a ping pong ball on an iiwa paddle.
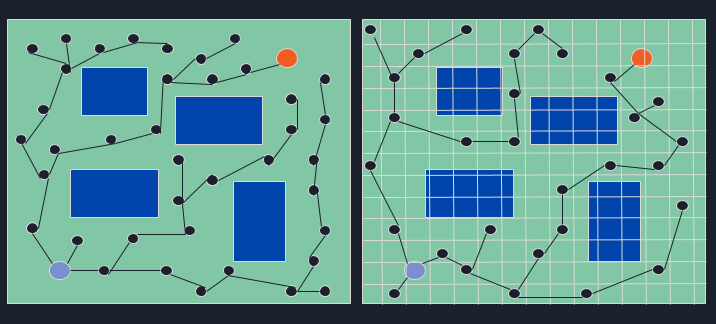
dRRT couples discrete sampling with search-based refinement, reusing computation to accelerate 5-DOF arm planning versus traditional RRT.
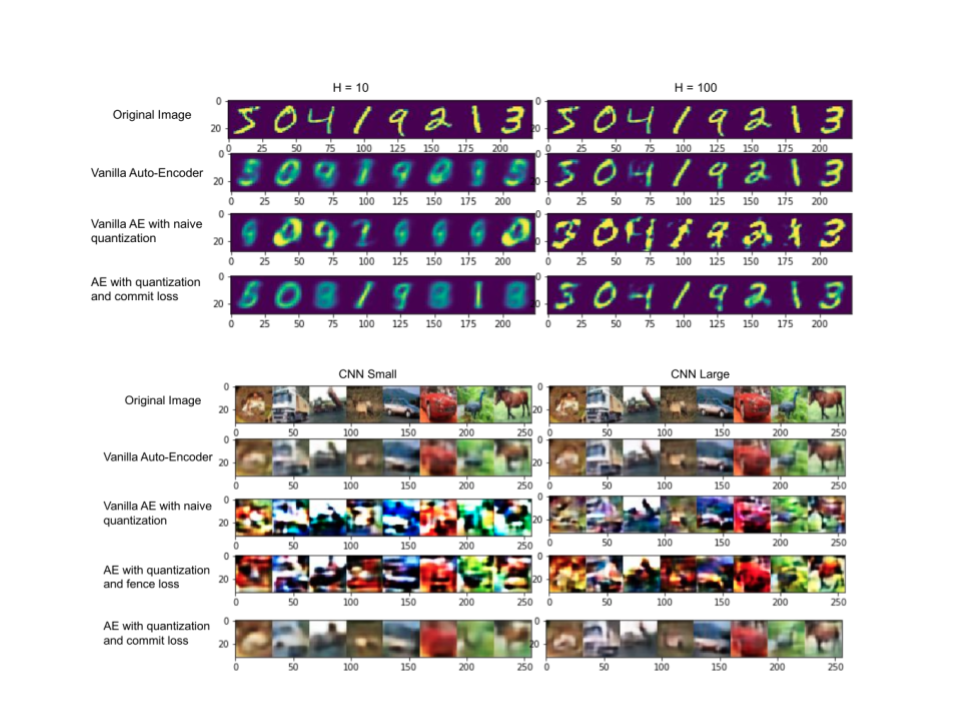
Tested quantization-aware autoencoders that couple commit loss and training-time discretization to achieve compact latent codes for images and text.
Collected simulator trajectories, trained a CNN to map images to steering commands, and demonstrated closed-loop driving in the Unreal Blocks environment.
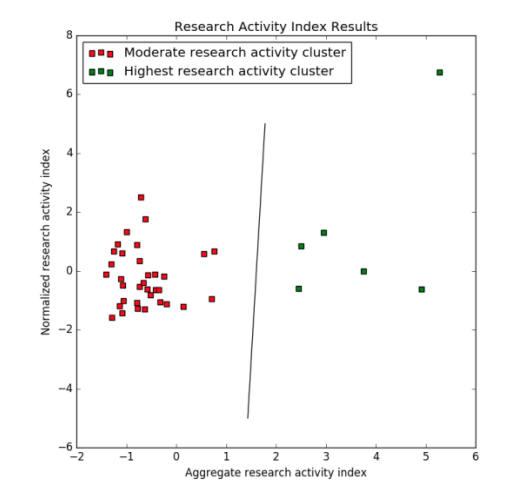
Designed quantitative criteria for research HEIs in India, applied them to top institutions, and surfaced 40 universities and 32 engineering colleges as research-focused.
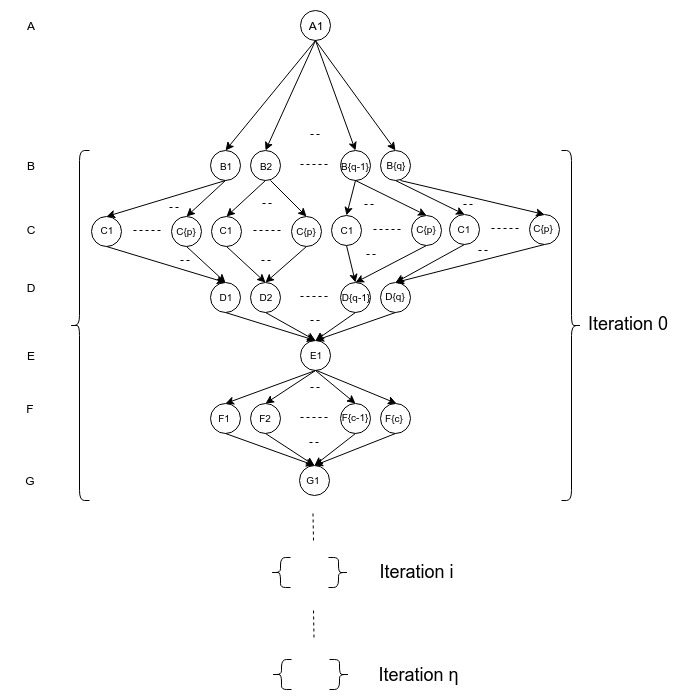
Work-efficient GPU traversal expands frontier vertices in parallel and accelerates DFS-based analytics on massive DAGs.
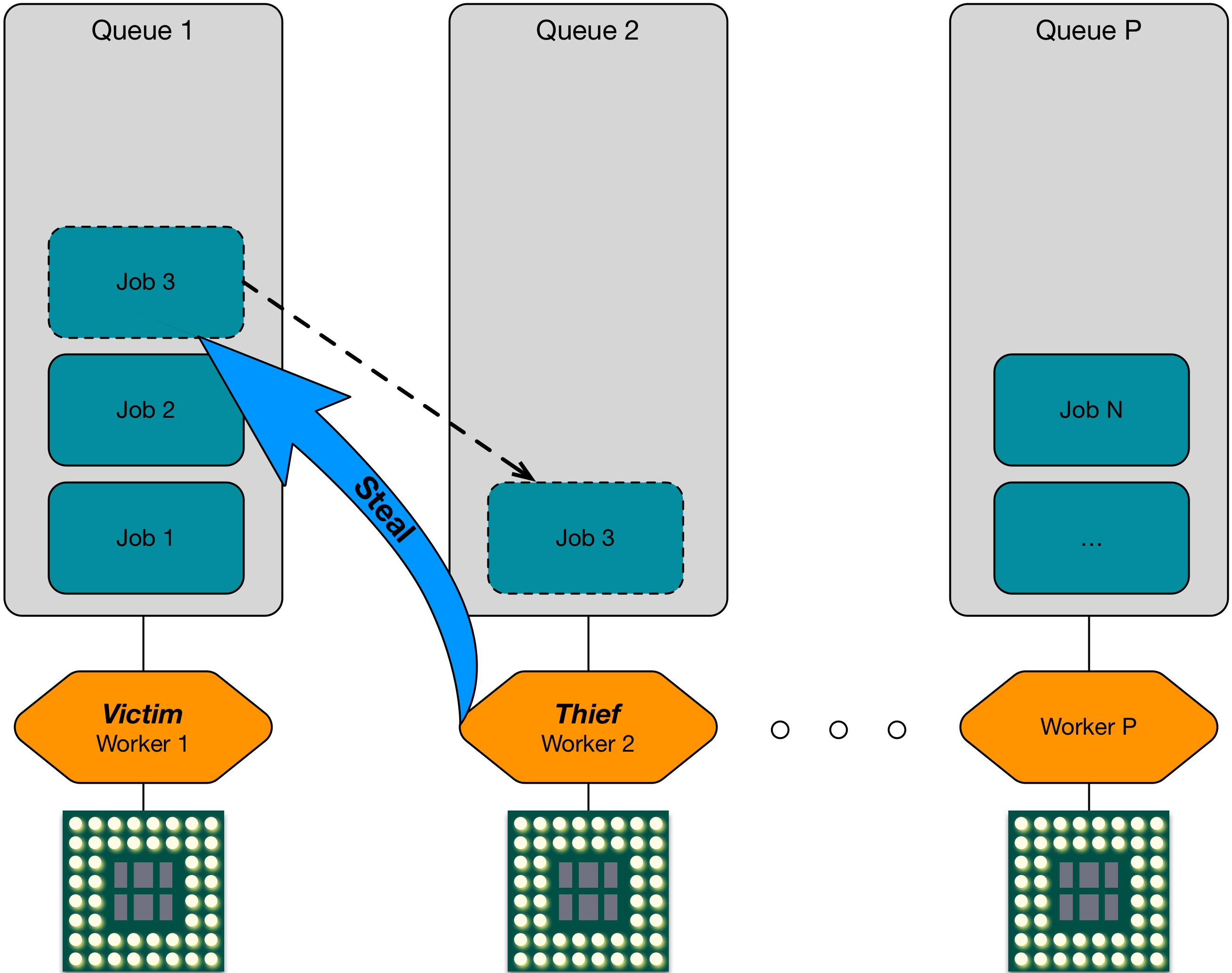
COTTON couples work stealing with CPU frequency scaling policies tuned by task heuristics, cutting energy use while preserving throughput.
Collected contribution signals, formed confidence-weighted implicit ratings, and trained a custom autoencoder that surfaces relevant GitHub repos for contributors.