
Catching a Ping Pong Ball with an iiwa
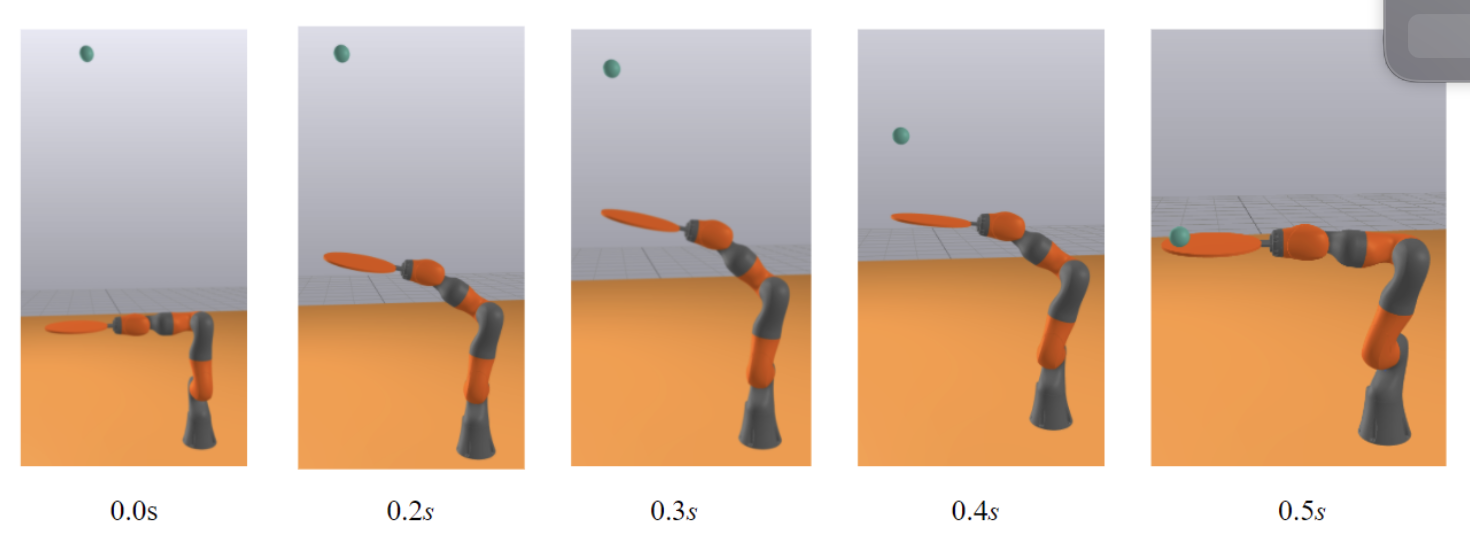
We programmed the kinematics of a KUKA iiwa in Drake to intercept and stabilize a ping pong ball using a ping pong paddle. The controller separates the task into pre-contact and post-contact regimes: before impact we apply projectile equations within a finite-state machine to position and orient the paddle, and after impact we switch to a PD controller with offset stabilization to keep the ball near equilibrium. Both regimes feed desired end-effector velocities to a differential IK controller that enforces joint limits. Using ground-truth ball and paddle states, the system consistently halts balls with diverse initial conditions, though long-term stabilization remains challenging and motivates future work.