
Sample-Based Planning under Discrete Space
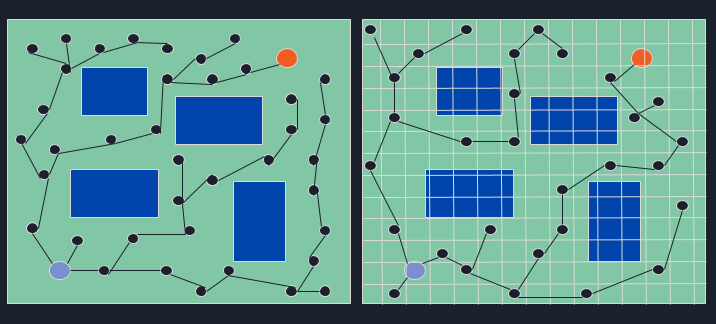
Introduced dRRT, a discrete sampling-based planner that combines Bresenham-style edge discretization with search-based heuristics to deliver anytime motion plans while reusing prior computation. In 5-DOF arm benchmarks, the method achieves faster convergence than classical RRT thanks to its hierarchical decomposition of the configuration space.