
Diffusion-Guided Multi-Arm Decentralized Motion Planning
Published in, NERC | Extended Abstract, 2024
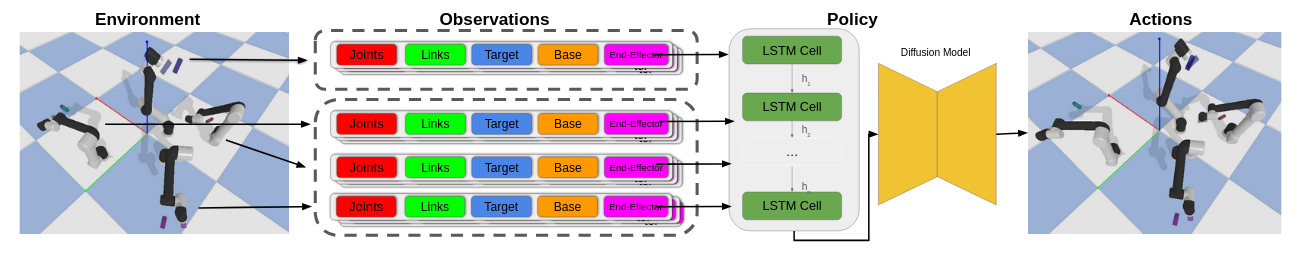
We guide decentralized controllers with diffusion-generated priors, allowing multiple robot arms to coordinate without centralized trajectory optimization.